По сигналам спутниковых радио-навигационных систем определяется с высокой точностью местоположение буровой машины, и используя данные от инерциальных датчиков (от 2х до 4х) рассчитывает координаты буровой головки.
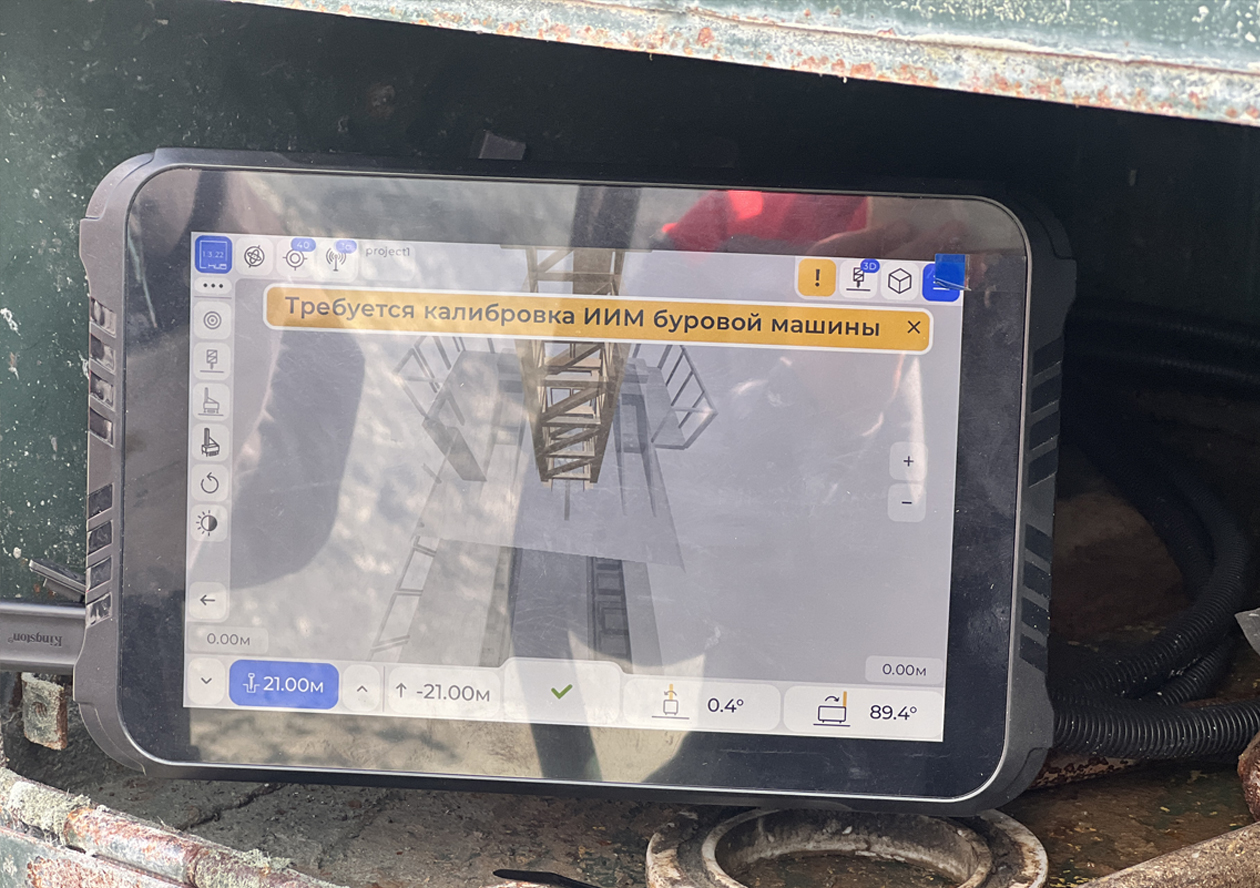
Оператор вручную перемещает буровую машину так, чтобы на экране монитора изображение буровой колонны совпало с изображением устья скважины, загруженного в память системы проекта буро-взрывных работ.
Система позиционирования КУБ так же учитывает наклон скважин в вертикальной плоскости, и имеет возможность сохранить информацию о фактически исполненных параметрах бурения (координаты, наклон, глубина и тд).
Дополнительные возможности
Выносной монитор, позволяет оператору маневрировать буровой машиной извне, и при этом наблюдать положение машины на фоне проекта, и таким образом с наибольшей точностью, и соблюдая меры безопасности, позиционировать буровую колонну над устьем предполагаемой к бурению скважины.
Стоимость 3D Системы нивелирования КУБ для бурового станка — от 2 950 000 ₽, в том числе НДС 22%. Цена указана за программно-аппаратный комплекс базовой комплектации. В стоимость включена бессрочная простая (неисключительная) лицензия на программное обеспечение панели управления (реестровый № 30458 в Едином реестре российского ПО Минцифры РФ; свидетельство о государственной регистрации программы для ЭВМ № 2025669277 от 24.07.2025). Итоговая стоимость зависит от комплектации и типа техники.
По сигналам спутниковых радио-навигационных систем определяется с высокой точностью местоположение буровой машины, и используя данные от инерциальных датчиков (от 2х до 4х) рассчитывает координаты буровой головки.
Оператор вручную перемещает буровую машину так, чтобы на экране монитора изображение буровой колонны совпало с изображением устья скважины, загруженного в память системы проекта буро-взрывных работ.
Система позиционирования КУБ так же учитывает наклон скважин в вертикальной плоскости, и имеет возможность сохранить информацию о фактически исполненных параметрах бурения (координаты, наклон, глубина и тд).
Дополнительные возможности
Выносной монитор, позволяет оператору маневрировать буровой машиной извне, и при этом наблюдать положение машины на фоне проекта, и таким образом с наибольшей точностью, и соблюдая меры безопасности, позиционировать буровую колонну над устьем предполагаемой к бурению скважины.
Стоимость 3D Системы нивелирования КУБ для бурового станка — от 2 950 000 ₽, в том числе НДС 22%. Цена указана за программно-аппаратный комплекс базовой комплектации. В стоимость включена бессрочная простая (неисключительная) лицензия на программное обеспечение панели управления (реестровый № 30458 в Едином реестре российского ПО Минцифры РФ; свидетельство о государственной регистрации программы для ЭВМ № 2025669277 от 24.07.2025). Итоговая стоимость зависит от комплектации и типа техники.